
Ackermann Steering
Ackermann Steering
- A steering technique used in car-like vehicles

- Invented by Rudolph Ackermann in 1818. Before this point, wheels always rolled with slip unless traveling straight ahead

- As the car travels along a curved paths, all tyres follow unique trajectories around a shared centre

- To avoid sliding, the geometry must steer the inside front tyre at a larger angle than the outside front
- Its premise is based on low-speed turning which applies to sedans. Sports cars tend to be configured toward parallel steer.
Equations
- Let be the track width, the wheel base, the relative steering angle of the inner wheel, the relative steering angle of the outer wheel, and the distance between ICC (instantaneous center of curvature) and the center of the car, we can write the following:

- By subtracting the reciprocal of these equations, and
considering the fact that , we can deduce:
Playable Demo
Ackermann Simple
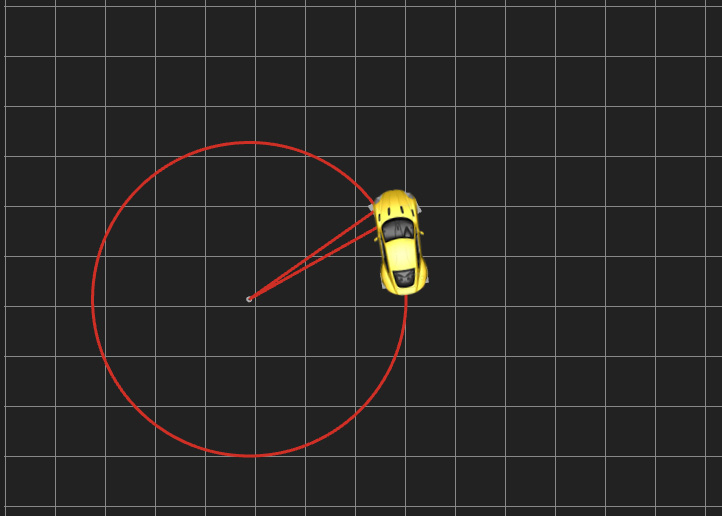
Ackermann Advanced